Servo
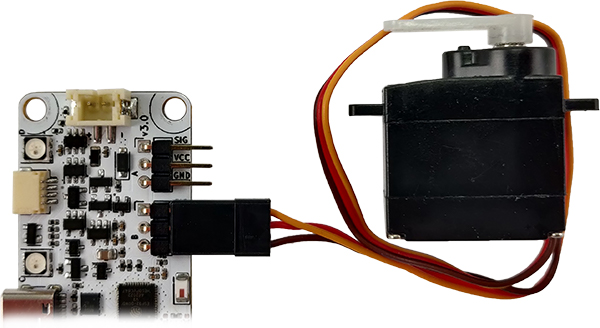
Servo wire colors:
• Orange = Signal (PWM)
• Red = VCC
• Brown = GND
Motor control interface for RoboBoard 3-pin SERVO ports.
May access specific port or all at once:
Servo.A,Servo.B,Servo.C,Servo.D- control single portServo[0]- control port A [1-B,2-C,3-D] (invalid indexes will be ignored)Servo- control all ports (some "get" functions are not available in this case)
Code snippets
// Control all servo ports
Servo.spinPos(0); // Move to center
Servo.spinPos(60); // Move 60% right
Servo.spinPosDuration(0, 1500); // Move to center in 1.5s
Servo.spinPosRPM(60, 30); // Move 60% right at 30RPM speed
Servo.spinAngle(0); // Move left
Servo.spinAngle(90); // Move to 90° (center)
Servo.spinPulse(1500); // Move to 1500µs (center)
Servo.coast(); // Motor free spin (no hold)
// Stop servo port B
Servo[1].stop();
// Configure servo A port
Servo.A.setInvert(true); // Invert spin direction
Servo.A.setSpeedRPM(30); // Set arm speed to 30RPM
Servo.A.setSpeedS60(0.17); // Set arm speed to 0.17s/60°
Servo.A.setTrim(-38, -7, 18); // Map pos to L: -38, C: -7, R: 18
// Change all ports period
Servo.setPeriod(20000); // Set period to 20000µs
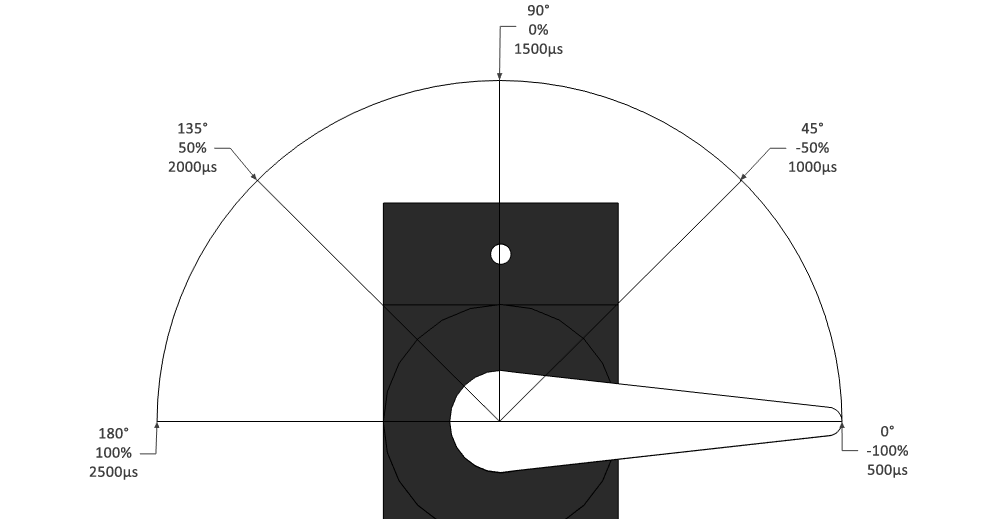
Most servos can turn its arm 180 degrees. This is controlled by applying range of 500-2500 μs (microseconds) pulse to signal wire. This corresponds to servo arm position. For convenience - there are 3 different control units:
spinPos()- set position in percentage of range [-100:100]%.0- center.spinAngle()- set position in angle degrees [0:180]°.90- center.spinPulse()- set actual microseconds pulse [500:2500]μs.1500- center.
In case setInvert(true) is enabled - servo arm will move to different direction, thus "pos" and "angle" values are inverted. "pulse" stays the same.
Calibration / trimming
Servo contains trimming feature to limit motor position to configured range. Mainly used for car steering with calibrated center position and maximum travel to left and right.
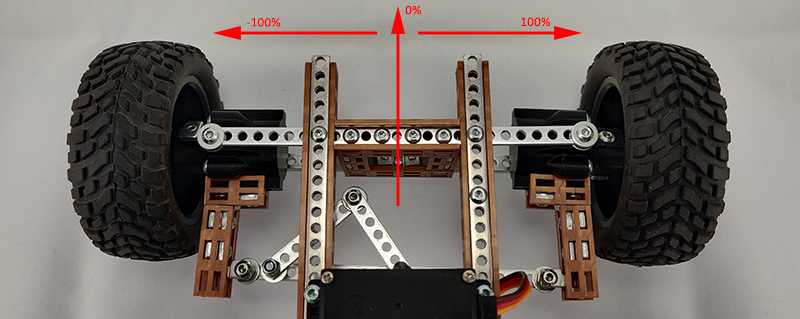
When configured, function spinPos() [-100:100] can be used to steer robot wheels.
Select motor parameters
Most servos operate in 500 to 2500μsec range and can turn its arm either 180° or 270°.
Set correct parameters if you are using different type of motor:
setMotor(180, 500, 2500)- 180°, 500-2500 μs (default)setMotor(180, 1000, 2000)- 180°, 1000-2000 μssetMotor(270, 500, 2500)- 270°, 500-2500 μssetMotor(270, 1000, 2000)- 270°, 1000-2000 μs
These values may be adjusted to match correct (calibrated) motor angle and pulses.
Function spinPulseRaw() can be used to find actual limits.
Can use SerialServoControl.ino example.
Tip
Some RoboBoard X3 kits contain motor with different microseconds range.
Add this configuration line to make it work properly: Servo.A.setMotor(180, 650, 2350)
Change spin direction
Using function spinPos() with negative / positive value [-100:100] will move motor between configured [500:2500] pulse range. If direction should be reversed - use function: setInvert(true).
Trim motor position
Typically, function spinPos() [-100:100] will turn servo motor in its full range. When placed in a robot - most of the times there are mechanical limits that should be accounted for and center position is shifted. Trimming allows to offset center position and specify how far motor should spin to either side.
- Use function
spinPos()to find center position and maximum turn to left and right - Enter discovered values to function
setTrim(-38, -7, 18)
Now function spinPos() [-100:100] will operate inside configured limits.
// Calibrate
Servo.A.setMotor(180, 500, 2500); // angle, usMin, usMax
Servo.A.setInvert(true); // invert
Servo.A.setTrim(-38, -7, 18); // position limits left, center, right
// Move (spin to position)
Servo.A.spinPos(0); // [-100:100] (spins to -7)
Functions
 Position control
Position control
Servo.A.spinPos(position)
¶
Servo.A.spinPosDuration(position,duration)
¶
Servo.A.spinPosRPM(
position,speed) ¶-
Move servo to position (%).
Parameter:
position- servo position [-100:100]%
duration- time duration for position to change time in ms
speed- motor speed in rounds per minute (RPM) units [1:~60].
Servo.A.spinAngle(angle)
¶
Servo.A.spinAngleDuration(angle,duration)
¶
Servo.A.spinAngleRPM(
angle,speed) ¶-
Move servo to angle (°).
Note: maximum angle depends onsetMotor()configuration.
Parameter:
angle- servo angle [0:180]°
duration- time duration for position to change time in ms
speed- motor speed in rounds per minute (RPM) units [1:~60]
Servo.A.spinPulse(pulse)
¶
Servo.A.spinPulseDuration(pulse,duration)
¶
Servo.A.spinPulseRPM(
pulse,speed) ¶-
Move servo to exact pulse (µs).
Parameter:
pulse- time [500:2500]µs (microseconds)
duration- time duration for position to change time in ms
speed- motor speed in rounds per minute (RPM) units [1:~60] Servo.A.spinPulseRaw(
pulse) ¶-
Write pulse directly, without any value filter and conversion. Also ignores
setInvert().
Parameter:
pulse- time [0:period]µs (microseconds) Servo.A.coast() ¶
-
Set motor to free spin (can be moved by hand). Stops PWM signal output.
Note: Some motors may not support this feature (holds position even without PWM signal). positionServo.A.getPos() ¶-
Get current servo position (%).
Returns:
position- servo position [-100:100]% angleServo.A.getAngle() ¶-
Get current servo angle (°).
Returns:
angle- servo angle [0:180]° pulseServo.A.getPulse() ¶-
Get current servo pulse (µs).
Returns:
pulse- pulse time [500:2500]µs (microseconds)
Limit trimming
Servo.A.setTrim(left,right)
¶
Servo.A.setTrim(
left,center,right) ¶-
Set motor rotation limits for
spinPos()function. Uses position percentage parameters.
• Parameter values must come in order! left < center < right.
•setInvert()must be set correctly before calling this function. Position values internally are converted to pulses.
• Ifcenterparameter is not provided - it is set to middle value betweenleftandright.
Parameter:
left- steer to left limit [-100:100]%
center- center position [-100:100]%
right- steer to right limit [-100:100]%
Servo.A.setTrimPulse(min,max)
¶
Servo.A.setTrimPulse(
min,center,max) ¶-
Set motor rotation limits for
spinPos()function. Uses exact pulse (µs) parameters.
FunctionspinPulseRaw()can be used to discover required values.
• Parameter values must come in order! min < center < max.
• [usMin:usMax] range depends onsetMotor()configuration. Typically [500:2500].
• Ifcenterparameter is not provided - it is set to middle value betweenminandmax.
Parameter:
min- minimum pulse limit [usMin:usMax]µs (microseconds)
center- center pulse position [usMin:usMax]µs (microseconds)
max- maximum pulse limit [usMin:usMax]µs (microseconds)
Spin speed
Servo.A.setSpeedRPM(speed)
¶
Servo.A.setSpeedS60(
seconds) ¶-
Set constant servo speed (to slow it down).
Servo motors are capable ~60 RPM at top. Setting value0will use maximum motor speed.
Parameter:
speed- motor speed in rounds per minute (RPM) units [1:~60].
seconds- (float) motor speed in seconds / 60 degree units (e.g.0.16= 62.5RPM).
It is commonly found in servo motors description.
speed Servo.A.getSpeedRPM()
¶
secondsServo.A.getSpeedS60() ¶-
Get configured servo speed.
Returns:
speed- motor speed in rounds per minute (RPM) units [1:~60].
seconds- (float) motor speed in seconds / 60 degree units (e.g.0.16= 62.5RPM).
It is commonly found in servo motors description.
Move sequences
Run list of predefined servo movements with position and delay. Convenient to use when some repetitive action has to be performed in background.
void setup() {
// Run list of inline servo movements
Servo.A.run({
{500, 0}, // delay:500, position:0
{500, -50}, // delay:500, position:-50
{1000, 0}, // delay:1s, position:0
{500, 50}, // delay:500, position:-50
});
Servo.A.wait(); // Wait for started sequence to end
// Define sequence list
ServoSequence list[] = {
{500, 40}, // delay:500, position:40
{500, 0}, // delay:500, position:0
{500, -40}, // delay:500, position:-40
{500, 0}, // delay:500, position:0
};
// Run specified list 3 times and stop
Servo.A.run(list, 3);
}
void loop() { }
Maximum of 6 moves in sequence available.
Servo.A.run(sequence[])
¶
Servo.A.run(
sequence[],times) ¶-
Run provided list of movements in order. Executed in background and does not block code.
Additionally,timesparameter can be provided to repeat this list number of times.
Parameter:
sequence[]- array ofServoSequence.
times- number of times to repeat sequence.0- repeat. Default:1. stateServo.A.isMoving() ¶-
Check if servo motor is currently moving. Works in a few cases:
1. Motor is executing servo sequencerun().
2. Motor is moving with custom speedsetSpeedRPM().
3. Motor is moving with duration/RPMspinPosDuration().
Other cases it will returnfalse!
Returns:state-trueif motor is moving,falseif stationary.
state Servo.A.wait()
¶
stateServo.A.wait(time) ¶-
Wait for motor to stop moving (block code until). Works in a few cases:
1. Motor is executing servo sequencerun().
2. Motor is moving with custom speedsetSpeedRPM().
3. Motor is moving with duration/RPMspinPosDuration().
Other cases it will returntrueright away without blocking!
Parameter:time- maximum time to wait (ms) for motor move end.0- disabled.
Returns:state-truemotor finish moving,falsetimeout. Servo.A.stop() ¶
-
Stop currently moving servo motor:
1. Running servo sequence (started withrun()).
2. Moving with configured duration/RPM.
Configuration
Servo.A.setEnable(
state) ¶-
Enable / disable servo output. Will stop signal generation if disabled.
Parameter:
state- turn motor port on / off [true:false]. Servo.A.setInvert(
state) ¶-
Invert servo spin direction.
Parameter:
state- invert spin direction [true:false] Servo.A.setMotor(
angle,usMin,usMax) ¶-
Set Servo motor configuration. Default: 180deg, 500us, 2500us
Parameter:
angle- maximum motor spin angle (180deg or 270deg)
usMin- min position pulse [0:period]µs (microseconds)
usMax- max position pulse [0:period]µs (microseconds) stateServo.A.getEnable() ¶-
Check if servo output is enabled (yes / no).
Returns:
state- enabled / disabled [true:false]. stateServo.A.getInvert() ¶-
Check if motor spin direction is inverted (yes / no).
Returns:
state- yes / no [true:false]. ParamsServo.A.getMotor() ¶-
Get servo motor configuration of
setMotor(). Default (180,500,2500) µs.
Returns:
Params- MotorType structure.
void setup() { auto range = Servo.A.getMotor(); range.angle; // Max angle range.usMin; // Min microseconds limit range.usMax; // Max microseconds limit // Alternative use Servo.A.getMotor().angle; Servo.A.getMotor().usMin; Servo.A.getMotor().usMax; }
Range Servo.A.getTrim()
¶
RangeServo.A.getTrimPulse() ¶-
Get configured position range of
setTrim(). Default: [-100:0:100].
Returns:
Range- Range structure.
void setup() { auto range = Servo.A.getTrim(); range.min; range.mid; range.max; // Alternative use Servo.A.getTrim().min; Servo.A.getTrim().mid; Servo.A.getTrim().max; } numberServo.getPortsCount() ¶-
Get number of servo ports board has.
Returns:
number- servo ports count [2:4]
Change PWM period:
Servo.setPeriod(
period) ¶-
Set custom servo signal period (default 20000µs (50Hz)) (all ports)
Parameter:
period- signal window time [0:65535]µs (microseconds) numberServo.getPeriod() ¶-
Get configured servo signal period (default 20000µs (50Hz)).
Returns:
number- signal window time [0:65535]µs (microseconds)