IMU
Control interface for integrated RoboBoard I2C accelerometer and gyroscope sensor.
#include <Wire.h>
void setup() {
Wire.begin(); // Start I2C interface (for communication with sensor)
auto result = IMU.read();
}
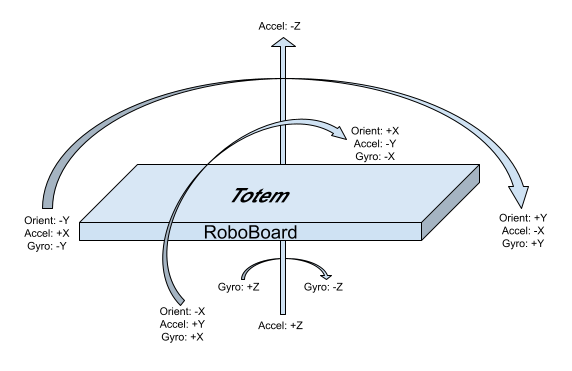
IMU sensor (based on MEMS technology) measures movement in 3 acceleration axis and 3 rotation axis. Allows to determine board movement, position, rotation angles.
Sensor is sharing I2C Wire (SDA, SCL pins) with Qwiic port, so it acts as additional module on the bus. Can be also used with third-party library.
Tip
In order to use sensor, you must enable I2C by calling Wire.begin() inside setup() function. Otherwise IMU functionality will not work.
Only raw sensor measurements available. Advanced orientation algorithms not yet implemented.
Code snippets
#include <Wire.h> // Required for "Wire.begin"
void setup() {
// Start I2C at 400kHz
// Calling "Wire.begin()" will start in 100kHz mode
// SDA, SCL - pins connected to IMU and Qwiic port
Wire.begin(SDA, SCL, 400000); // Required for "IMU"
}
void loop() {
auto result = IMU.read(); // Store measurements in "result"
Serial.println(result.getX_G()); // Read unit from "result"
delay(100); // Wait 100ms for next read
}
Functions
Read sensor
Called IMU.read() function will sample measurements from IMU sensor and return in a single IMUData object. It contains functions to read data in different measurement units without require for additional conversions.
IMU.begin() ¶
-
Initialize IMU sensor. Function
IMU.read()calls this internally, so it's only useful if need to prepare sensor before first read operation. IMUDataIMU.read() ¶-
Read measurements from IMU sensor.
Returns structure with accelerometer, gyroscope and temperature data.
Note:Wire.begin()must be called in order forIMUto work!
Returns:
IMUData- object with sensor data. Read Access data for more info.
Access data
Available units:
- Gravitational force (G)
- Acceleration in meters per squared seconds (m/s2)
- Rotation speed in degrees per second (dps)
- Rotation speed in radians per second (rad/s)
- Rotation speed in rounds per minute (RPM).
- Orientation in angle degrees (°)
Accelerometer:
unit result.getX_G()
¶
unit result.getY_G()
¶
unitresult.getZ_G() ¶-
Get gravitational force (G) measurement of X, Y, Z axis.
Returns:
unit- (float) gravitational force [-16.0,16.0]G.
unit result.getX_mss()
¶
unit result.getY_mss()
¶
unitresult.getZ_mss() ¶-
Get acceleration in meters per second squared of X, Y, Z axis.
Returns:
unit- (float) [-157.0,157.0]m/s2.
Gyroscope:
unit result.getX_dps()
¶
unit result.getY_dps()
¶
unitresult.getZ_dps() ¶-
Get rotation in degrees per second of X, Y, Z axis.
Returns:
unit- (float) [-2000.0,2000.0]dps.
unit result.getX_rads()
¶
unit result.getY_rads()
¶
unitresult.getZ_rads() ¶-
Get rotation in radians per second of X, Y, Z axis.
Returns:
unit- (float) [-35.0,35.0]rad/s.
unit result.getX_rpm()
¶
unit result.getY_rpm()
¶
unitresult.getZ_rpm() ¶-
Get rotation in rounds per minute of X, Y, Z axis.
Returns:
unit- (float) [-333.0,333.0]RPM.
Temperature:
Internal sensor / board temperature (not a room temperature!).
unitresult.getTempC() ¶-
Get IMU sensor temperature in Celsius.
Returns:
unit- (float) temperature25.0°C. unitresult.getTempF() ¶-
Get IMU sensor temperature in Fahrenheit.
Returns:
unit- (float) temperature77.0°F.
Orientation:
Accelerometer based orientation measurements (susceptible to shaking).
unit result.getOrientX()
¶
unitresult.getOrientY() ¶-
Board orientation in space of X and Y axis.
Returns:
unit- (float) orientation [-180.0:180.0] degrees. unitresult.getRoll() ¶-
Get roll estimation.
Returns:
unit- (float) roll [-180.0:180.0] degrees. unitresult.getPitch() ¶-
Get pitch estimation.
Returns:
unit- (float) pitch [-90.0:90.0] degrees.
Configure sensor
IMU.setAccelRange(
range) ¶-
Configure accelerometer measurement range (in gravitational force).
Can be lowered if higher precision is required.
Parameter:
range- max (G) range [2,4,8,16]. Default: 16. IMU.setGyroRange(
range) ¶-
Configure gyroscope measurement range (in degrees per second).
Can be lowered if higher precision is required.
Parameter:
range- max (dps) range [250,500,1000,2000]. Default 2000. rangeIMU.getAccelRange() ¶-
Get configured accelerometer measurement range (in gravitational force).
Will return exact value configured in sensor.
Returns:
range- max (G) range. rangeIMU.getGyroRange() ¶-
Get configured gyroscope measurement range (in degrees per second).
Will return exact value configured in sensor.
Returns:
range- max (dps) range. stringIMU.getName() ¶-
Get name of installed IMU sensor. Different variants exist in RoboBoard.
Returns:
string- name of IMU sensor. numberIMU.getI2CAddr() ¶-
Get I2C address of installed IMU sensor. Different variants exist in RoboBoard.
Returns:
number- I2C address of IMU sensor. stateIMU.isI2CAddr(address) ¶-
Check if specified
addressequal to installed IMU sensor.
Parameter:address- I2C address.
Returns:state-trueif address match.
Sensor variants
Each RoboBoard contains different IMU sensor. See table below for part number and I2C address. These parameters can be also acquired dynamically using IMU.getName() and IMU.getI2CAddr() functions.
| RoboBoard X3 v3.x | RoboBoard X4 v1.0 | RoboBoard X4 v1.1 |
|---|---|---|
| QMI8658 | LSM6DS3 | ICM-20689 |
| 0x6B | 0x6A | 0x68 |