GPIO / Qwiic
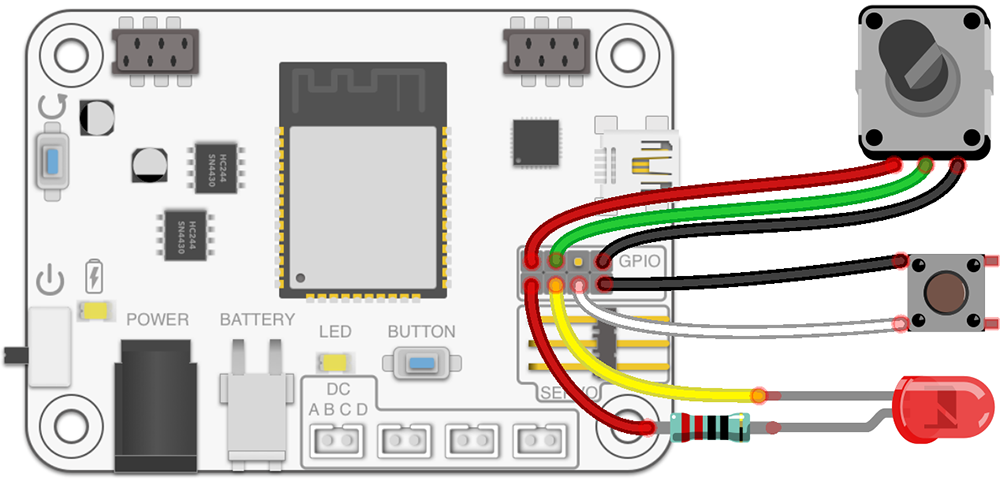
RoboBoard contains GPIO pins for hooking up external electronics. Can be used for simple input, output operations or with communication protocols (UART, I2C, SPI, ...).
Works same as any other Arduino development board (like TotemDuino).
Additional Qwiic port is available to connect external I2C modules.
void setup() {
Serial.begin(115200); // Start serial at 115200 baud rate
pinMode(GPIOC, OUTPUT); // Set GPIOC to OUTPUT (HIGH or LOW)
pinMode(GPIOD, INPUT_PULLUP); // Set GPIOD to INPUT (pull HIGH)
}
void loop() {
// If RoboBoard button is pressed - pulsate LED on GPIOC pin
if (Button.isPressed()) {
for(int i=0; i<255; i+=15) { analogWrite(GPIOC, i); delay(10); }
for(int i=255; i>0; i-=15) { analogWrite(GPIOC, i); delay(10); }
return;
}
// Check if button is pressed (connects to GND)
if (digitalRead(GPIOD) == LOW) Serial.print("Button press, ");
// Read potentiometer position 0-4095
Serial.println(analogRead(GPIOA)); // Read pin GPIOA analog
delay(100); // Wait 100ms
digitalWrite(GPIOC, LOW); // Turn LED on
delay(100); // Wait 100ms
digitalWrite(GPIOC, HIGH); // Turn LED off
}
Arduino pin names
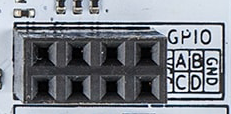
Arduino pins: GPIOA, GPIOB, GPIOC, GPIOD.
VCC: 3.3V output (2A max), GND: Ground pin.
| Name | Pin | Exclusive function |
|---|---|---|
| GPIOA | 14 | MOSI, Analog, Touch |
| GPIOB | 23 | MISO |
| GPIOC | 25 | SCK, Analog, DAC |
| GPIOD | 26 | SS, Analog, DAC |
| - | 21 | SDA |
| - | 22 | SCL |
- GPIOB does not support
analogRead()! - SPI can be mapped to any pin (
MOSI,MISO,SCK,SSonly shows default mapping). - All pin definitions can be found in pins_arduino.h file.
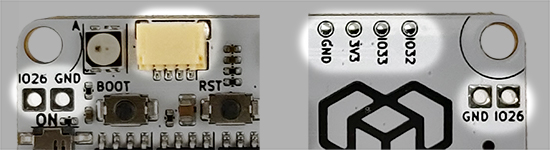
Arduino pins: IO26, IO32, IO33.
Servo pins: SIGA, SIGB, SIGC, SIGD.
3V3: 3.3V output (0.8A max), GND: Ground pin.
Qwiic port right: Control Qwiic I2C modules over Wire object. I2C pins SDA, SCL.
Yellow port left: Control Qwiic I2C modules over Wire1 object. I2C pins SDA1, SCL1.
Or access pins IO32, IO33, 3V3, GND using "Qwiic jumper cable".
| Name | Pin | Exclusive function |
|---|---|---|
| IO26 | 26 | Analog, Touch, DAC, MOSI |
| IO32 | 32 | Analog, Touch, SCL1, MISO |
| IO33 | 33 | Analog, Touch, SDA1, SCK |
| - | 15 | SDA |
| - | 5 | SCL |
| SIGA | 25 | DAC |
| SIGB | 14 | Touch, SS |
| SIGC | 16 | Touch |
| SIGD | 17 | - |
- Output power 3V3 can be turned off with function
Board.setEnable3V3(). - SIGx pins can be used when motor is not connected. Contains 120 Ohm resistor!
- Left yellow port does not have pull-up resistors!
- SPI can be mapped to any pin (
MOSI,MISO,SCK,SSonly shows default mapping). - All pin definitions can be found in pins_arduino.h file.
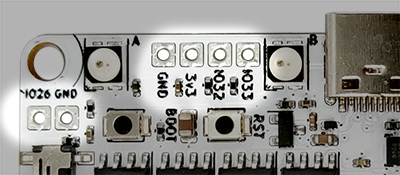
Arduino pins: IO26, IO32, IO33.
Servo pins: SIGA, SIGB.
3V3: 3.3V (0.5A max), GND: Ground pin.
Qwiic port right: Control Qwiic I2C modules over Wire object. I2C pins SDA, SCL.
| Name | Pin | Exclusive function |
|---|---|---|
| IO26 | 26 | Analog, Touch, DAC, MOSI |
| IO32 | 32 | Analog, Touch, SCL1, MISO |
| IO33 | 33 | Analog, Touch, SDA1, SCK |
| - | 15 | SDA |
| - | 5 | SCL |
| SIGA | 25 | DAC |
| SIGB | 14 | Touch, SS |
- Output power 3V3 can be turned off with function
Board.setEnable3V3(). - SIGx pins can be used when motor is not connected. Contains 120 Ohm resistor!
- SPI can be mapped to any pin (
MOSI,MISO,SCK,SSonly shows default mapping). - All pin definitions can be found in pins_arduino.h file.
Using I2C
I2C (Inter-Integrated Circuit) / TWI (Two-wire Interface) communication protocol used for controlling many different devices and modules. Main communication protocol of Qwiic port.
In Arduino environment it is called "Wire".
General I2C documentation | examples
Wire object is mapped to pins of Qwiic port and IMU sensor.
To start I2C - include Wire.h file and call Wire.begin() inside setup() function to run with default parameters. A few more options available:
Wire.begin()- set default pins and frequency (speed) to 100kHz.Wire.begin(SDA, SCL, 400000)- set default pins with 400kHz speed.Wire.begin(GPIOA, GPIOB, 400000)- set to GPIOA, GPIOB pins with 400kHz speed.Wire.begin(GPIOA, GPIOB)- set to GPIOA, GPIOB pins with 100kHz speed.Wire.setPins(GPIOA, GPIOB)- set to GPIOA, GPIOB pins before callingWire.begin(). Used to change SDA, SCL pins for libraries that callsWire.begin()internally.
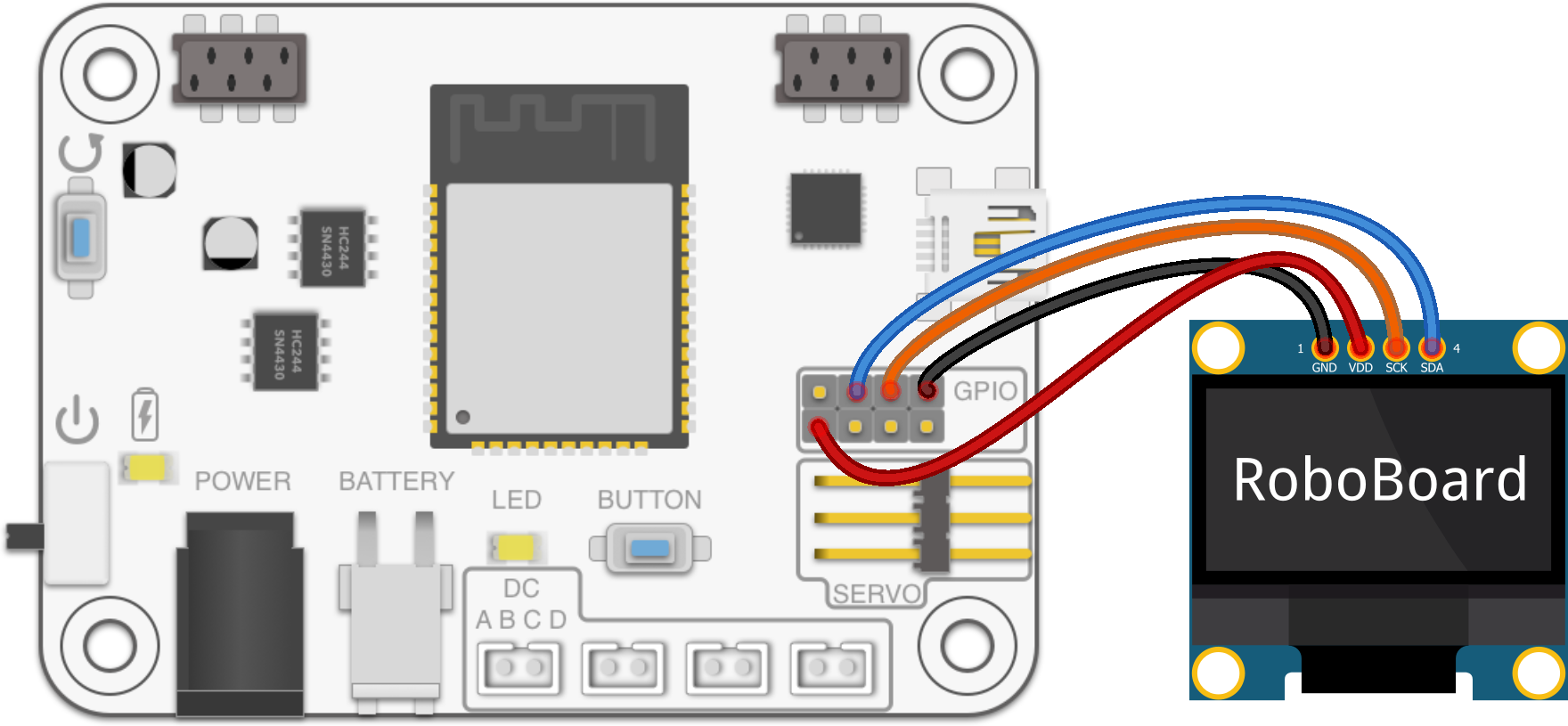
#include <Wire.h>
#include <Adafruit_GFX.h> // (1) Adafruit-GFX library
#include <Adafruit_SSD1306.h> // (2) Adafruit_SSD1306 library
Adafruit_SSD1306 display(128, 64);
void setup() {
delay(500); // Wait for display to turn on
// Set I2C SDA pin to GPIOA
// Set I2C SCL pin to GPIOB
// (other pins can be used also)
Wire.setPins(GPIOA, GPIOB);
// Initialize display (Wire.begin() is called inside library)
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
for(;;); // Don't proceed, loop forever
}
// Print text
display.clearDisplay(); // Clear the buffer
display.setTextSize(2); // Change text size
display.setTextColor(SSD1306_WHITE); // Set color
display.setCursor(10, 25); // Center
display.println("RoboBoard"); // Set text
display.display(); // Write to display
}
void loop() {
}
ESP32 has two I2C channels: Wire (mapped to Qwiic port) and Wire1 (free to use).
It's recommended to use Wire1 with GPIO pins, as it allows simultaneous use of Qwiic port and GPIO pins. Most Arduino libraries expects to communicate over Wire.
Example using Wire1 with GPIO
#include <Wire.h>
#include <Adafruit_GFX.h> // (1) Adafruit-GFX library
#include <Adafruit_SSD1306.h> // (2) Adafruit_SSD1306 library
// Change to second "Wire1" I2C peripheral
Adafruit_SSD1306 display(128, 64, &Wire1);
void setup() {
delay(500); // Wait for display to turn on
// Set Wire1 I2C SDA pin to GPIOA
// Set Wire1 I2C SCL pin to GPIOB
// (other pins can be used also)
Wire1.setPins(GPIOA, GPIOB);
// Initialize display (Wire1.begin() is called inside library)
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
for(;;); // Don't proceed, loop forever
}
// Print text
display.clearDisplay(); // Clear the buffer
display.setTextSize(2); // Change text size
display.setTextColor(SSD1306_WHITE); // Set color
display.setCursor(10, 25); // Center
display.println("RoboBoard"); // Set text
display.display(); // Write to display
}
void loop() {
}
Using UART (Serial)
UART (Universal Asynchronous Receiver / Transmitter) protocol is a base of most Serial communications. Can be used to communicate with external devices or printing debug messages inside Serial Monitor. Uses two wires TX, RX for transmit and receive. Both devices (on both ends) has to use same baud rate (communication speed).
In Arduino environment it is called "Serial".
Serial API documentation | examples
ESP32 has three separate UART channels:
Serial- standard one, mapped to USB (for printing to Serial Monitor).Serial1- free to use. Recommended with GPIO pins.Serial2
Serial object can be also mapped to GPIO pins if required.
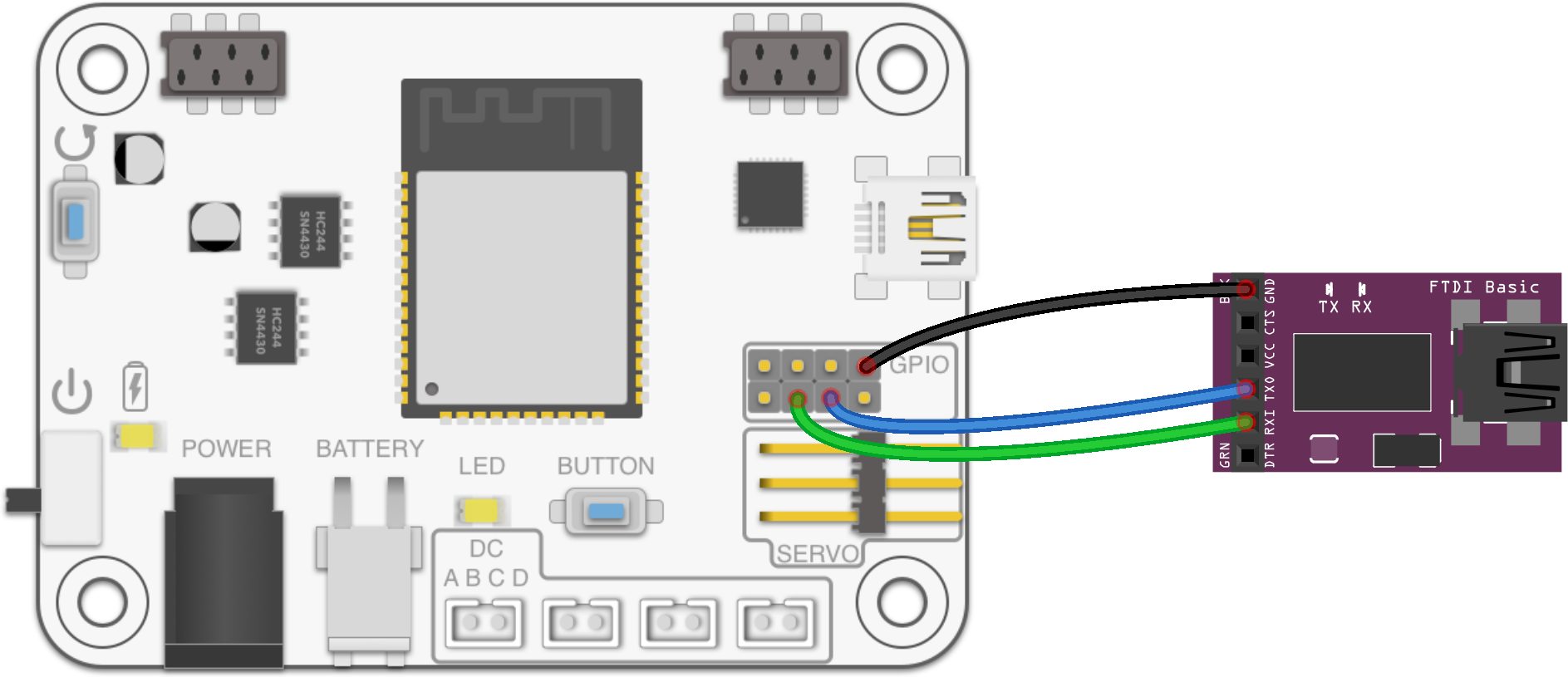
void setup() {
// Map GPIOC to TX <-> FTDI RX
// Map GPIOD to RX <-> FTDI TX
// (other pins can be used also)
// Begin UART over GPIO pins (config: 8bit data, 1 stop bit, no parity)
Serial1.begin(115200, SERIAL_8N1, GPIOD, GPIOC); // baud, config, rx, tx
}
int counter;
void loop() {
// Use "Serial1" to print over GPIO pins
Serial1.print("Test ");
Serial1.println(counter++);
delay(100);
}
Using SPI
Serial Peripheral Interface is commonly used for fast communication speed (up to 40 MHz). Uses 4 wires (CS, SCK, MISO, MOSI).
In Arduino environment it is called "SPI".
SPI documentation
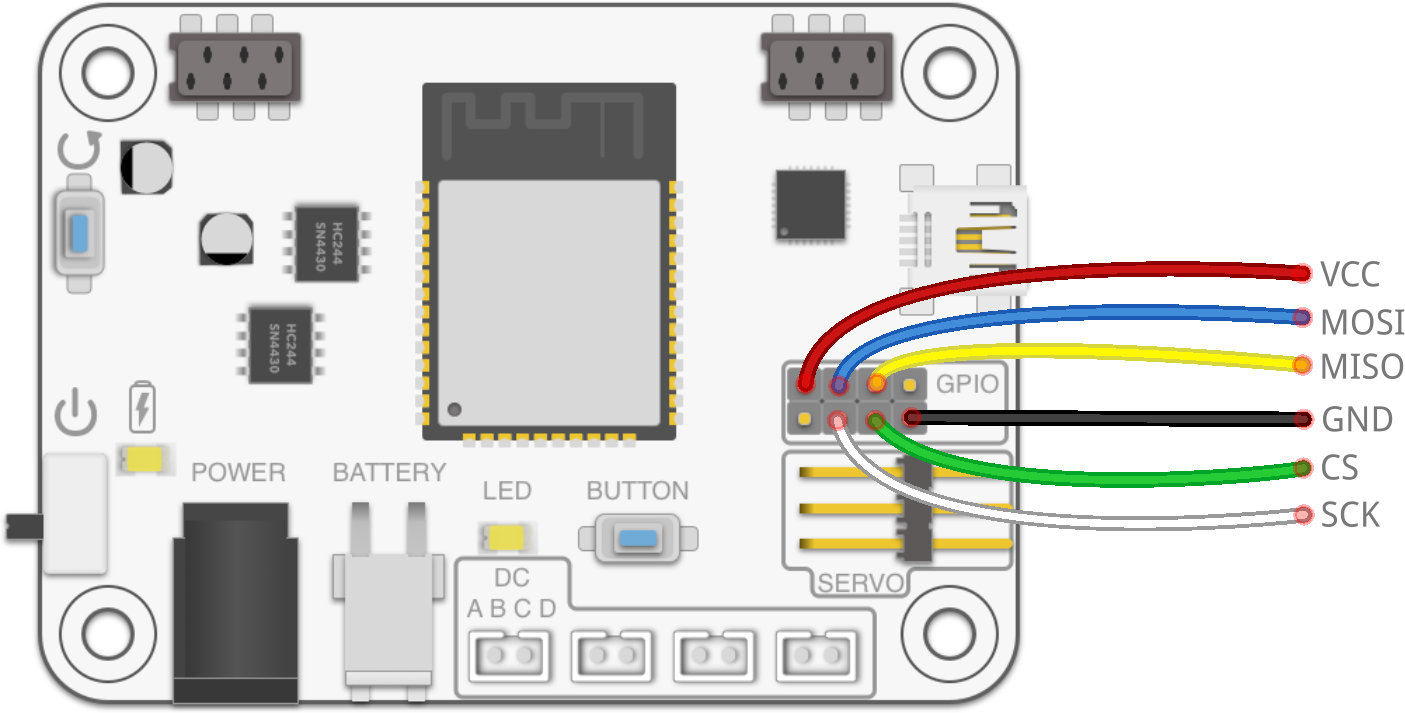
#include <SPI.h>
// Set GPIOD pin as "CS"
const static int CS = GPIOD;
void setup() {
// Set CS pin as output
pinMode(CS, OUTPUT);
// Set SPI pins SCK, MISO, MOSI
// (other pins can be used also)
SPI.begin(GPIOC, GPIOB, GPIOA);
// Write byte 0x55 over SPI
SPI.beginTransaction(SPISettings()); // Transaction settings can be added
digitalWrite(CS, LOW); // Pull CS pin LOW to initiate transfer
SPI.transfer(0x55); // Transfer byte 0x55
digitalWrite(CS, HIGH); // Pull CS pin HIGH to end transfer
SPI.endTransaction(); // End transaction
}
void loop() {
}
Using other peripherals
GPIO pins can be used with multiple peripherals. Each one has its own advantages and use cases. View full list:
- ADC - read pin analog value (voltage).
documentation | example - DAC - output pin analog value (voltage).
documentation - Digital IO - output pin digital value (GND or VCC).
documentation - I2C - two wire, master-slave protocol.
documentation | examples - I2S - serial bus for digital audio (mic and speakers).
documentation | examples - LEDC - LED Control peripheral, PWM generator.
documentation | examples - RMT - send infrared or neopixel messages.
documentation | examples - SigmaDelta - sigma delta modulation generator.
documentation | example - SPI - Serial Peripheral Interface. Fast master-slave communication.
documentation | examples - Touch - pin touch sensor (capacitive).
documentation | examples - TWAI (CANbus) - Two-Wire Automotive Interface (CAN bus).
Used internally for TotemBUS.
examples
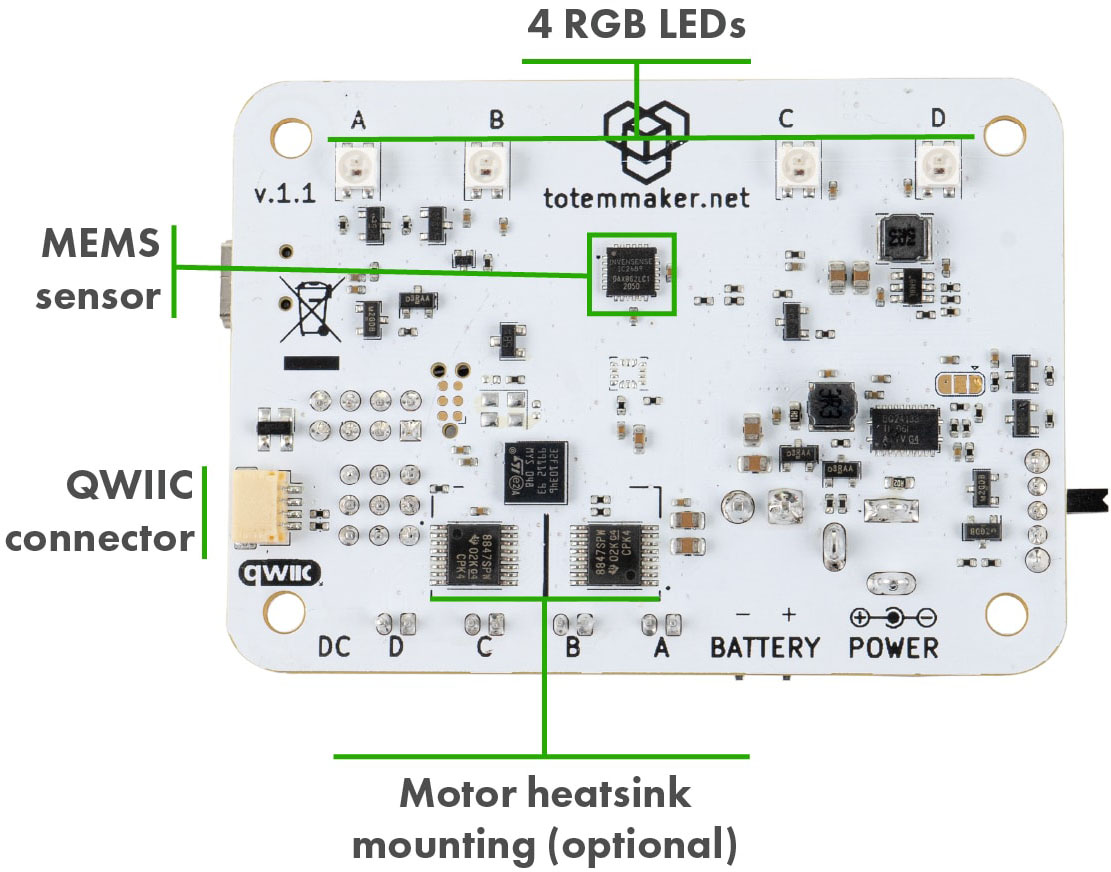
Qwiic port
A connection system to attach third-party I2C modules. This allows to choose from many available sensors and other interface devices. Small and sturdy connector eliminates need for soldering and enables plug-and-play style modular systems. Each module comes with its own Arduino library (supplied by manufacturer).
This port is compatible with SparkFun Qwiic and Adafruit STEMMA QT modules.
Connector
Standard "Qwiic" connector with I2C communication and 3.3V power line. Modules usually contain 2 connectors for joining multiple of them (daisy-chaining).
Single RoboBoard Qwiic port can host multiple modules.
Standard I2C Qwiic port. Controlled with Wire object. I2C pins SDA, SCL.
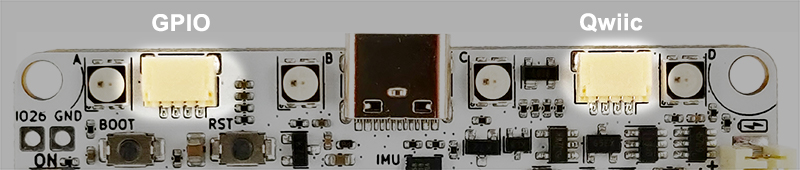
Contains 2 distinctive ports:
• Qwiic - standard I2C Qwiic port. Controlled with Wire object. I2C pins SDA, SCL.
• GPIO - optional I2C port. Controlled with Wire1 object. I2C pins SDA1, SCL1.
"GPIO" does not have pull-up resistors!.
Standard I2C Qwiic port. Controlled with Wire object. I2C pins SDA, SCL.
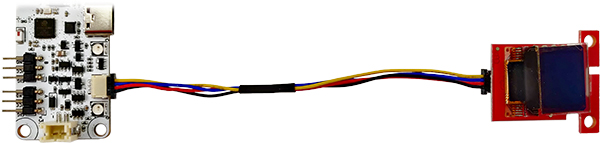
Wires:
• Black = GND
• Red = 3.3V
• Blue = SDA
• Yellow = SCL
Cable: standard "Qwiic cable". Can be found in local electronics store.
Connector: SM04B-SRSS-TB 4-pin
Installing modules
When module is connected to the RoboBoard - it will simply power on but won't do anything. To make any use of it - you need to install Arduino library, specific to connected module. It should be provided by manufacturer. Libraries also contain example code, explaining how to use it.
Usage example
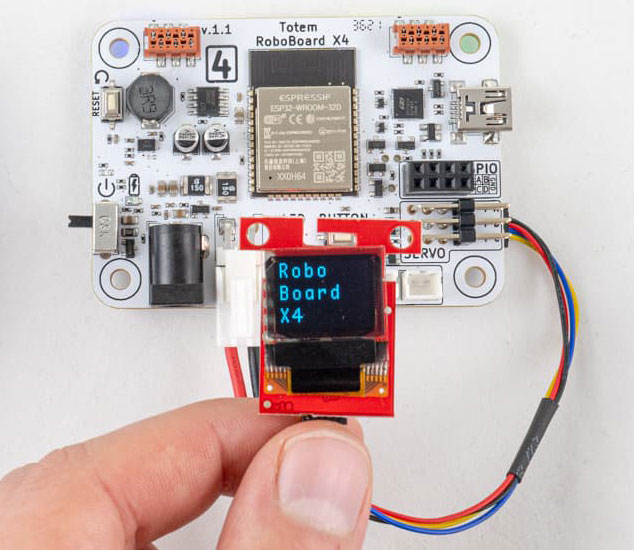
Code example to display text as in picture:
#include <Wire.h>
#include <SFE_MicroOLED.h> // (1) SparkFun Micro OLED Breakout library
#define PIN_RESET GPIOA // Not used
MicroOLED oled(PIN_RESET); // I2C declaration
void setup() {
Wire.begin(); // Initialize I2C
oled.begin(0x3D, Wire); // Initialize OLED
oled.clear(ALL); // Clear display internal memory
oled.clear(PAGE); // Clear buffer
oled.setFontType(1); // Change font for bigger letters
oled.setCursor(0, 0); // Set cursor to top-left
oled.println("Robo"); // Print text
oled.println("Board");
oled.println("X4");
oled.display(); // Display what's in the buffer
}
void loop() {
}
Qwiic vs STEMMA QT
A different brand names describing same connector and pin order. One is introduced by SparkFun, another by - Adafruit.
- STEMMA QT modules - works with 3.3V and 5V microcontrollers (like Arduino UNO).
- Qwiic modules - works with 3.3V microcontrollers only! (can't use with Arduino UNO).
Totem RoboBoard is 3.3V so both brand modules can be used.
Internal pin mapping
A list of ESP32 pins that are assigned to specific functions inside RoboBoard. Only for reference and shouldn't be accessed directly. Used internally by RoboBoard API.
| Number | Name | Description |
|---|---|---|
| 1 | Serial TX | UART communication over USB |
| 3 | Serial RX | UART communication over USB |
| 15 | SDA | I2C bus pin routed to IMU and Qwiic port. Has external 2k2 Ohm pull-up |
| 5 | SCL | I2C bus pin routed to IMU and Qwiic port. Has external 2k2 Ohm pull-up |
| 26 | IO26 | GPIO pin |
| 32 | IO32 | GPIO pin |
| 33 | IO33 | GPIO pin |
| 22 | MOTORA_INA | DC motor port A pin 0 |
| 12 | MOTORA_INB | DC motor port A pin 1 |
| 23 | MOTORB_INA | DC motor port B pin 0 |
| 19 | MOTORB_INB | DC motor port B pin 1 |
| 18 | MOTORC_INA | DC motor port C pin 0 |
| 21 | MOTORC_INB | DC motor port C pin 1 |
| 4 | MOTORD_INA | DC motor port D pin 0 |
| 2 | MOTORD_INB | DC motor port D pin 1 |
| 25 | SERVOA_IN | Servo motor port A (SIG) |
| 14 | SERVOB_IN | Servo motor port B (SIG) |
| 16 | SERVOC_IN | Servo motor port C (SIG) |
| 17 | SERVOD_IN | Servo motor port D (SIG) |
| 0 | BUTTON | BOOT button |
| 13 | RGB | RGB light strip data pin |
| 27 | 3V3_EN | Peripheral 3.3V LDO enable pin |
| 34 | VERSION_DETECT | Detect board revision |
| 35 | BATTERY_CHARGE | State of battery charging (if charging) |
| 36 | BATTERY_CURRENT | Battery current measurement |
| 37 | BATTERY_VOLTAGE | Battery voltage measurement |
| 38 | USB_DETECT | State of USB port (is plugged in) |
| 39 | IMU_INT | IMU chip interrupt pin |
| Number | Name | Description |
|---|---|---|
| 1 | Serial TX | UART communication over USB |
| 3 | Serial RX | UART communication over USB |
| 21 | SDA | I2C bus pin routed to IMU and Qwiic port. Has external 2k2 Ohm pull-up |
| 22 | SCL | I2C bus pin routed to IMU and Qwiic port. Has external 2k2 Ohm pull-up |
| 14 | GPIOA | GPIO pin |
| 23 | GPIOB | GPIO pin |
| 25 | GPIOC | GPIO pin |
| 26 | GPIOD | GPIO pin |
| 17 | CAN_TX | CAN bus transmit pin routed to TotemBUS |
| 34 | CAN_RX | CAN bus receive pin routed to TotemBUS |
| 5 | CAN_EN | CAN bus transceiver enable (active LOW) |
| 4 | DRIVER_DFU | Device Firmware Update pin of STM32 co-processor |
| 15 | DRIVER_RESET | Reset pin of STM32 co-processor |
| 16 | DRIVER_RX | UART RX pin of STM32 co-processor |
| 27 | DRIVER_TX | UART TX pin of STM32 co-processor |
| 13 | LED | Status LED bellow ESP32 |
| 18 | BUTTON | User button below ESP32 |
| 39 | USB_DETECT | State of USB port (is plugged in) |
| 36 | BATTERY_VOLTAGE | Battery voltage measurement |
| 35 | IMU_INT | IMU chip interrupt pin (v1.1 only) |
| 14 | IMU_INT | IMU chip interrupt pin (v1.0 only) |
RoboBoard X4 v1.0 GPIO
First revision of RoboBoard X4 had GPIO pins connected to co-processor instead of ESP32. For this reason Arduino API can't be used and special commands are required to interact. This also limits to digital read / write and analog read / write only.
GPIO control functions (click to expand)
- X410_digitalWrite(
pin,state) - Set GPIO pin state. Works similar like Arduino function
digitalWrite().
Calling this function will reconfigure pin to output.
Parameter:
pin- pin number [0:3]
state- GND (0V) or VCC (3.3V) [LOW:HIGH] - (
state) X410_digitalRead(pin) - Read GPIO pin state. Works similar like Arduino function
digitalRead().
Calling this function will reconfigure pin to input.
Returns:
pin- pin number [0:3]
state- GND (0V) or VCC (3.3V) [LOW:HIGH] - X410_analogWrite(
pin,value) - Set GPIO pin analog value. Works similar like Arduino function
analogWrite(). Calling this function will reconfigure pin to output.
Parameter:
pin- pin number [0:3]
value- analog value [0:20]. (0, 10, 20) = (0V, 1.65V, 3.3V). - (
value) X410_analogRead(pin) - Read GPIO pin analog value. Works similar like Arduino function
analogRead(). Calling this function will reconfigure pin to output.
Returns:
pin- pin number [0:3]
value- analog value [0:1023]. (0, 512, 1023) = (0V, 1.65V, 3.3V). - X410_pinMode(
pin,mode) - Turn on GPIO pin pulldown or pullup resistor. Works similar like Arduino function
pinMode(pin, INPUT_PULLUP).
Parameter:
pin- pin number [0:3]
mode- turn on pulldown or pullup [LOW:HIGH]. (LOW, HIGH) = (GND (0V), VCC (3.3V)).
Example:
void loop() {
// Toggle GPIOA pin
X410_digitalWrite(GPIOA, HIGH);
delay(1000);
X410_digitalWrite(GPIOA, LOW);
delay(1000);
}