BBC micro:bit
Guide for Totem RoboBoard remote control using BBC micro:bit and MakeCode.
How it works?
- micro:bit
bluetooth uart servicestarts BLE server. - RoboBoard connects
bluetooth uart service(advertised by micro:bit). - Block
bluetooth uart write numberis used to constantly send A and B button state. - RoboBoard intercepts pressed buttons in
void microbitOnWrite(String data). - Function
void microbitWriteString(String data)can be used to send data back to micro:bit (intercepted bybluetooth on data receivedblock).
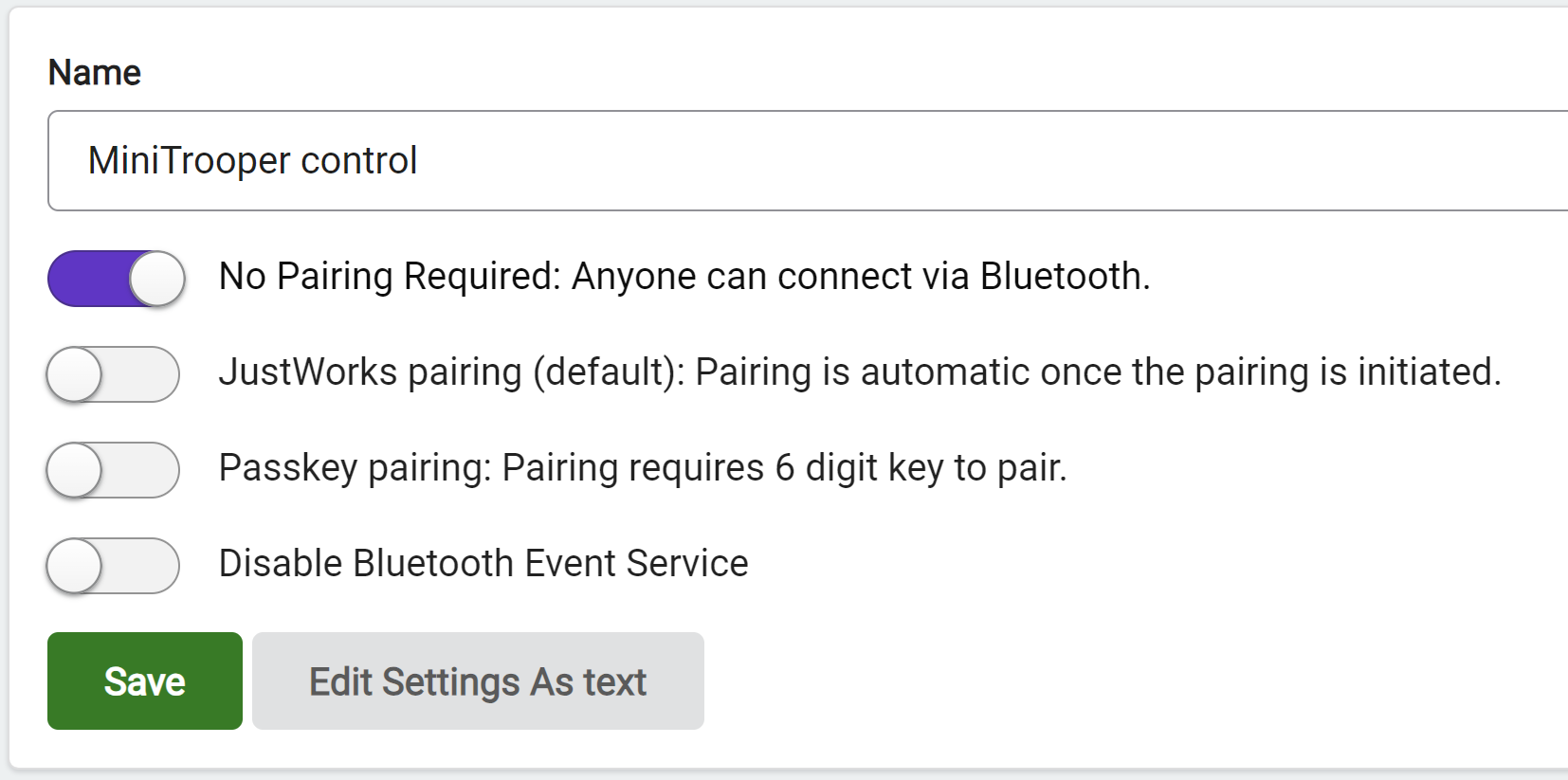
Setup micro:bit
Download provided MakeCode project to micro:bit.
Note: make sure "No Pairing Required" is selected inside Settings -> Project Settings.
Setup RoboBoard
Upload example code to RoboBoard: Microbit_Controller.ino
Note: Example is made for Totem MiniTrooper but can be adapted to other robots.
Functions
// Should be called inside setup()
// Establishes connection to micro:bit
void microbitBegin();
// Send number or string to micro:bit
// Will be received inside [bluetooh on data received] block
void microbitWriteString(String data);
// Receive data sent from micro:bit [bluetooth uart write] block
// [number] [string] [line] blocks are available, but they all send
// string (text) of certain length.
void microbitOnWrite(String data) {
int length = data.length(); // Get number of characters transmitted
int number = data.toInt(); // Convert received message to number
Serial.println(string); // Print received message to Serial Monitor
}
Check Arduino String reference for more functionality.
Connection
- Power on BBC micro:bit
- Power on RoboBoard (MiniTrooper)
- Press A + B buttons to control robot.
- Press RoboBoard X3 BOOT button to send it's state to micro:bit display.
Note: micro:bit tends to restart when plugged to PC. Power on MiniTrooper after micro:bit.